


Robô Delta D3PM-1100-P3
Característica do Produto
Característica
1、O tempo de ciclo padrão é inferior a 0,4s, atendendo à sua busca por alta velocidade e volume mínimo.
2 、 O design avançado do motor rotacional na plataforma móvel permite que o robô alcance facilmente alta precisão de rotação.
3、O robô é ideal para operações em espaços estreitos, bem como alta velocidade e alta precisão no campo 3C.Amplamente utilizado na montagem, manuseio e teste de pequenas peças.
Parâmetros do produto
| Tipo | D3PM-1100-P3 | |
| Eixos | 3+1 | |
| Carga útil | 3kg | |
| Manipulador | Peso | 85kg |
| Diâmetro | 1100 mm | |
| Repetibilidade | Posição | 0,05 mm |
| Rotação | 0,05° | |
| Velocidade máxima | 500 pp/min | |
| Faixa de rotação | ±360 | |
| Momento máximo de inércia permitido | 31×10-4kg.m2 | |
| Faixa de Ângulo do Braço Acionado | Acima | 32,5º |
| Abaixo | 68,5º | |
| Fonte de energia | Trifásico 380VAC -10%~+10%, 49~61HZ | |
| Capacidade de energia | 10KVA | |
| Potência nominal | 6,1 kW | |
| Temperatura de armazenamento | -10℃~70℃ | |
| Ambiente de trabalho | -10℃~50℃,UR≤80% | |
| Proteção | IP55 | |
Desenho do Produto
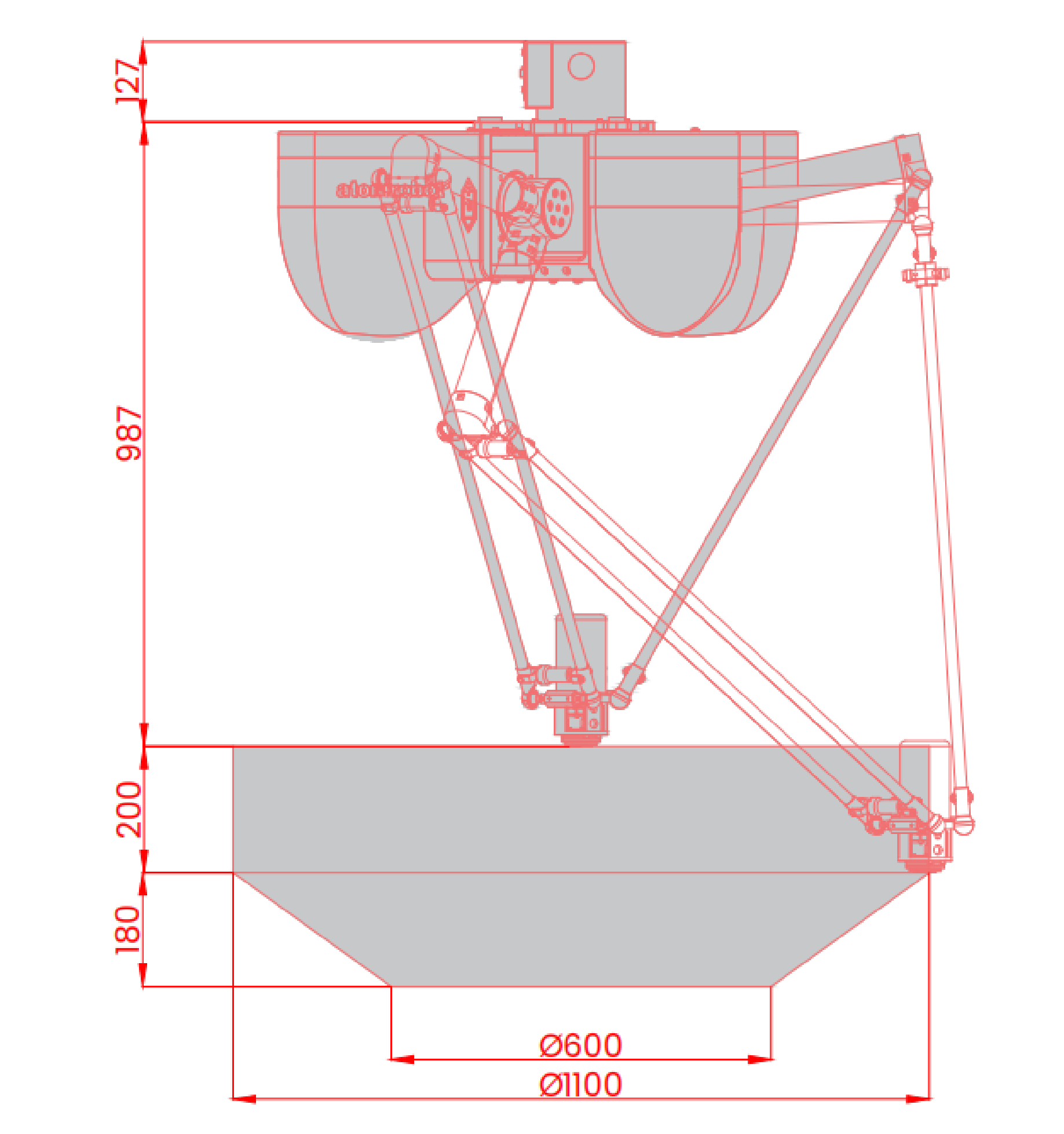
01.Dimensões e faixa de trabalho (mm)
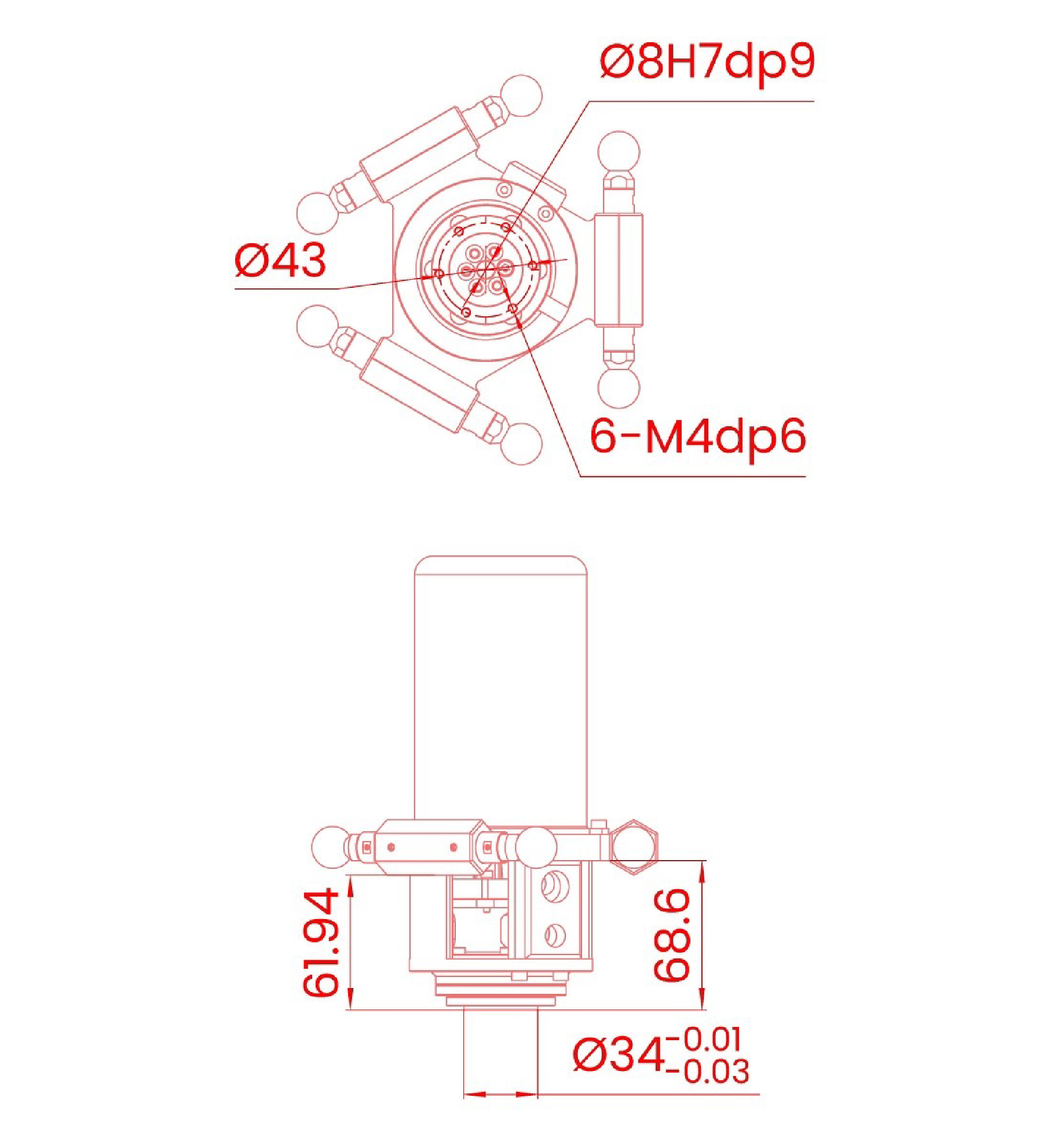
02. Flange(mm)
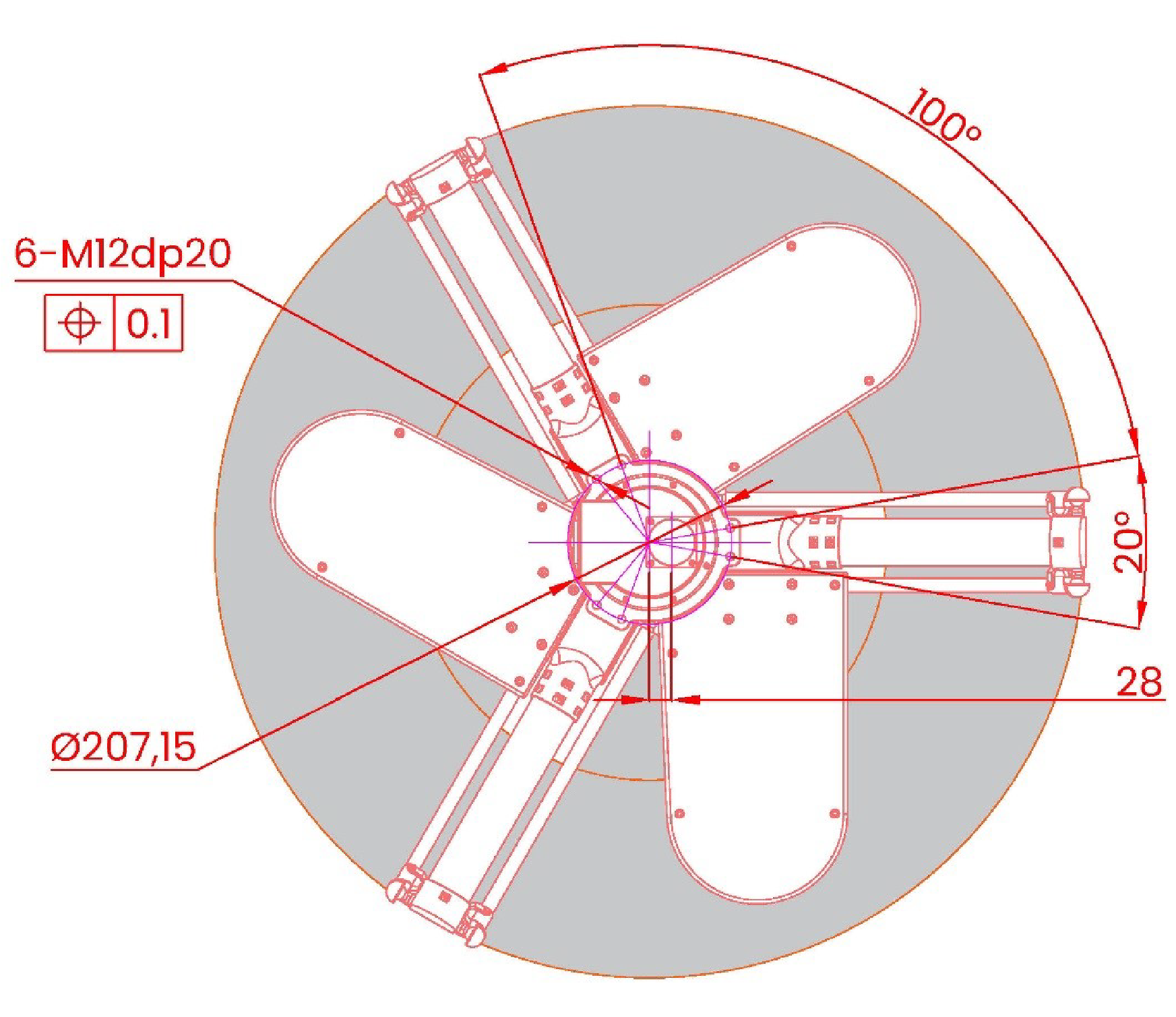
03. Instalação básica (mm)
Escreva aqui sua mensagem e envie para nós





